
1.P-Bus概述及設計基礎
P-Bus產品是基于埃施朗Pyxos IO總線的產品,與Lonworks總線可以無縫對接。要了解P-Bus總線產品,首先要理解P-Bus總線,下面先介紹P-Bus(Pyxos IO)總線。
1.1 P-bus系統的概述
P-bus系統是基于美國Echelon公司開發的Pyxos嵌入式控制網絡平臺為基礎的總線技術,它是一種專門擴展I/O總線的技術,使用該技術可以使得任何機器內部的各個組成部分之間形成智能的數字控制網絡,它是一種低成本的、網絡自安裝的技術,而且能夠和現有的基于GB/Z 20177的Lonworks控制網絡平臺技術結合,構成任意規模的自動控制網絡。
1.2 P-bus系統的特點
基于Pyxos 技術的P-Bus具有以下特點:
(1)、自管理網絡:Pyxos FT網絡不需要特殊的工具或者專業的技術人員就可以實現網絡的配置,這能夠降低網絡的安裝和維護成本,實現網絡的即插即用。
(2)、自由拓撲網絡布線:基于Pyxos FT技術的設備或組件之間相連接時,使用一對雙絞線,支持多種靈活的連接方式:總線、星形、環形、菊花鏈形和任意的拓撲結構,這樣的網絡安裝方式,可以減少材料和安裝人員成本,此外,由于只使用一對雙絞線,意味著能夠有效降低由于線路原因所導致的網絡故障。
(3)、鏈路電源技術(Link Power): Pyxos FT技術,支持在一對雙絞線上,既傳輸網絡數字信號,又能傳輸24V的交流或直流電,也就是說,基于Pyxos FT技術的設備,可以同時從通信數據線上取得工作電源。這些特點,特別適合那些不能為設備提供本地供電方式的應用場合。
(4)、無極性的網絡連接:Pyxos FT技術使用曼切斯特編碼方式,采用雙相PSK調制,載波頻率與通信位速率相同,即載波頻率312.5KHZ,通信速率為312.5kbps,另外在波形的調制成形方面,充分考慮到使通信信號實現最小的反射。通信中,使用前導編碼,實現通信信號無極性,從而避免由于安裝錯誤引發的故障。
(5)、高可靠性的通信:由于物理層通信收發器和通訊協議已經集成在一個芯片上,該芯片是采用MLF20封裝形式,大小為5平方毫米,能夠實現高可靠性的數據通訊。
(6)、強大的兼容性:不同廠家的元件、軟件在TCP/IP, RS485等協議下可以無縫兼容,可保障系統運行、維保的穩定性。P-bus樓宇智能安裝系統結構是分布總線式結構,系統內一個主設備(Pilot節點)下的各從設備(Point節點)是對等關系,不依賴于其他從設備。
(7)、強大的擴展性:任何從設備的損壞不會影響到系統中其他設備和功能的運行,維護保養方便。系統具有強大的可擴展性,針對于功能的增加或控制回路、電氣的增加,只需增加掛接相應的主設備和從設備,系統內原有的硬件、接線無需改動便能達到要求。
(8)、方便布線施工:整個系統只需要一條P-bus總線進行連接,沒有大量的電纜敷設和繁雜的控制設計。控制模塊安裝在智能控制箱內。現場控制面板只需一條P-bus總線進行連接,采用24V安全電壓供電的方式,安全可靠,操作方便。
(9)、節約能源、方便管理、維護:功能和控制的修改方便靈活,只需少量的程序調整,不需要現場重新布線就可以實現。此外,可節約能源,提高效率。通過將時鐘,光線控制設定使系統自動運行到最佳狀態,合理節約能源,方便管理和維護。
(10)、安裝使用方便:所有控制模塊均為模數化產品,采用標準35mm導軌安裝方式,安裝尺寸符合普通標準照明配電箱的規格。所有現場控制面板及移動感應器均采用標準86盒嵌墻安裝方式,施工簡單,并且不同的面板及idong感應器可隨時互換、控制功能變更方便。
1.3 P-bus系統的通信協議
P-bus系統通信協議是基于Pyxos通訊協議,是一種基于分時復用技術(TDM)的鏈路層數據通信協議,使用雙相PSK信號調制技術。所有設備都能夠周期地、可預測地取得網路的使用權,也就是說,設備可以實現確定性的操作;在數據報中沒有地址信息,只有數據,沒有額外的數據開銷;網路可以始終運行,不需要使用長的前導報文來進行網絡中設備間的同步,因而可以實現數據的高速通信;不需要使用心跳技術,正常的設備在每一個屬于自己的時間片都會發送數據,這樣能夠實現網絡的持續的管理。Pyxos通信協議是一個嚴格遵循主/從網絡結構的協議,在一個Pyxos網絡中可以有一個主設備(Pilot節點)和最多32從設備(Point節點)。所有的通信均通過Pilot,在不同的從設備Point之間不支持報文路由。Pyxos通信使用短的數據包進行通信,Pyxos網絡中有限的設備數目可以限制MAC延時。
1.4 P-bus系統的構成
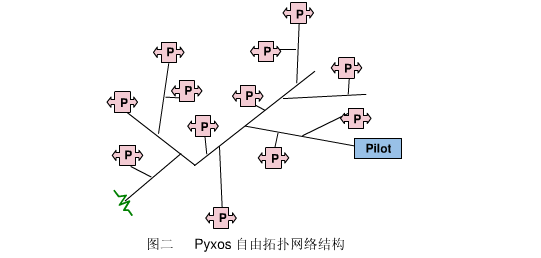
基于Pyxos網絡技術的設備連接構成網絡時,網絡拓撲支持總線拓撲和自由拓撲兩種方式。總線拓撲如圖一所示,自由拓撲如圖二所示。圖中P代表Pyxos中的Point節點。
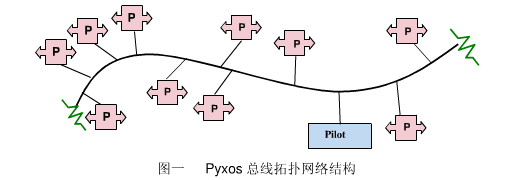
使用總線拓撲時,總線的最大長度為400米,分支長度可以為0.3米,在總線的兩端各是一個阻抗為105歐姆的阻容網絡組成的終端匹配器。
對于自由拓撲方式,Pyxos網絡所有的連線最長為100米,在網絡的任意位置使用一個阻抗為52歐姆的阻容網絡作為終端匹配器。
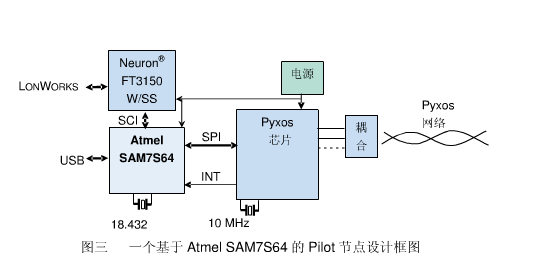
在Pyxos網絡中,Pilot和Point節點均使用一個Pyxos芯片。
1.5 基于 P-bus系統的設備
P-bus總線技術基于Pyxos嵌入式控制網絡,Pilot作為主設備,Point作為從設備,一個Pilot節點最多可以管理32個Point節點。Pilot節點必須使用一個主處理器,一個典型的Pilot設計如圖3所示。
說明:對于上面的描述,其中Pilot就是P-Bus產品的主節點,相當于樓宇自動化中的DDC,也就是現場智能控制器,對于P-Bus產品來說,也就是智能控制器,而P(Point)代表的是子節點,也就是P-Bus產品的現場模塊,如:開閉模塊、調光模塊、智能面板、溫濕度模塊、DI模塊等等,相當于樓宇自動化中的各個擴展模塊或輸入輸出模塊。主節點(智能控制器)與子節點(現場輸入輸出控制模塊)通過P-Bus總線構成網絡,可以是總線手拉手接線方式,也可以是樹葉類型的自由拓撲的接線方式,兩種不同的接線方式主要是總線距離會有所區別,總線手拉手方式下,距離為400米,自由拓撲方式下,距離為100米。
另外需要注意的是,P-Bus在一個Pilot(主節點)下面,目前只允許有32個Point從節點,也就是說在一個P-Bus智能控制器下面,目前最多允許掛接現場模塊32個,如果大于這個節點數量,需要增加P-Bus智能控制器,在P-Bus智能控制器上面構建更大的網絡。
P-Bus因為其特性,為工程提供了極大的便利性:
(1)接線方式靈活,可以手拉手接,也可以隨便的樹形接法-意即自由拓撲;
(2)接線不要擔心接錯,總線采用兩芯雙腳線,沒有正負之類的極性或者RS485之類的A、B之分,正接、反接都一樣;
(3)高速率,在最大距離模式下,比KNX、RS485等任何一種總線都快;
(4)高可靠,與RS485采用電平信號傳輸不一樣,P-Bus采用的是調制解調的專業通信方式進行通信,其可靠性與RS485的不是一種級別的技術。
1.6.P-Bus產品典型的系統架構
說明:對于上面的描述,其中Pilot就是P-Bus產品的主節點,相當于樓宇自動化中的DDC,也就是現場智能控制器,對于P-Bus產品來說,也就是智能控制器,而P(Point)代表的是子節點,也就是P-Bus產品的現場模塊,如:開閉模塊、調光模塊、智能面板、溫濕度模塊、DI模塊等等,相當于樓宇自動化中的各個擴展模塊或輸入輸出模塊。主節點(智能控制器)與子節點(現場輸入輸出控制模塊)通過P-Bus總線構成網絡,可以是總線手拉手接線方式,也可以是樹葉類型的自由拓撲的接線方式,兩種不同的接線方式主要是總線距離會有所區別,總線手拉手方式下,距離為400米,自由拓撲方式下,距離為100米。
另外需要注意的是,P-Bus在一個Pilot(主節點)下面,目前只允許有32個Point從節點,也就是說在一個P-Bus智能控制器下面,目前最多允許掛接現場模塊32個,如果大于這個節點數量,需要增加P-Bus智能控制器,在P-Bus智能控制器上面構建更大的網絡。
P-Bus因為其特性,為工程提供了極大的便利性:
(1)接線方式靈活,可以手拉手接,也可以隨便的樹形接法-意即自由拓撲;
(2)接線不要擔心接錯,總線采用兩芯雙腳線,沒有正負之類的極性或者RS485之類的A、B之分,正接、反接都一樣;
(3)高速率,在最大距離模式下,比KNX、RS485等任何一種總線都快;
(4)高可靠,與RS485采用電平信號傳輸不一樣,P-Bus采用的是調制解調的專業通信方式進行通信,其可靠性與RS485的不是一種級別的技術。
1.6.P-Bus產品典型的系統架構
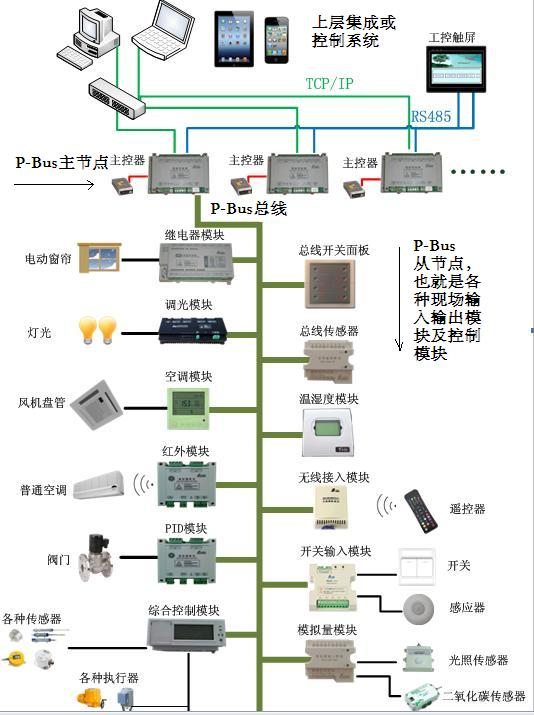
從上圖可以看出,P-Bus產品分為三層,(1)最下層為基于P-Bus總線的現場輸入、輸出模塊,如:開閉、繼電器輸出、調光、開關量輸入、模擬量輸入、模擬量輸出、溫濕度模塊、溫度控制器、無線接入等,這些模塊作為P-Bus總線的子節點;(2)中間為P-Bus總線的主節點,也就是智能控制器,它是可編程的,支持樓宇自動化(BA)、建筑環境與節能、智能照明、家庭智能化、機房智能化、客房控制及工業控制的編程邏輯,如:延時、調節、PID、開關、加減乘除運算、與或非邏輯運算、場景控制等等,是完全開放性的圖形化編程設計,相比于國內其他產品,該控制器是編程最為靈活,支持功能最多的照明、建筑環境、智能家居控制器;(3)最上層為中控系統、計算機控制系統層,在實際應用中,有的場所不配置,是作為可選的部分。
注意:如果下層P-Bus從節點(各個輸入輸出、控制模塊)大于一個智能控制所容納的數量,則需要增加智能控制器,各個智能控制器在同一層次構建上層網絡,網絡可以選擇RS485、TCP/IP以太網、Lonworks等;作為第三方接口,如:KNX、Bacnet及其它第三方產品將在智能控制器這邊接入。
主節點(智能控制器)是開放性的,支持Modbus、Lonworks等協議。
1.7 P-Bus產品的應用領域
由于P-Bus產品是可編程的系統,并且把信號模塊分為了數字量、模擬量和多媒體,對應提供了相應的現場模塊及集成解決方案,這就使得P-Bus產品的應用領域非常寬廣,幾乎涵蓋所有的機電監控領域,它采用了DCS系統設計,是工業級的解決方案,在樓宇智能化領域,主要適應以下應用:
-智能照明控制 -建筑環境與節能控制 -智能家居
-酒店照明及客房控制 -機房環境監控 -能源管理
-辦公樓智能控制系統 -會議室智能控制
系統既可以在公共建筑中,如:寫字樓、辦公樓、酒店、商場、圖書館、博物館、體育館、廣場、城市綜合體等使用,也可以用于家庭,如:別墅、普通住宅等。
1.8 P-bus系統結構注意事項
上述中提到P-Bus基于Pyxos FT技術,支持在一對雙絞線上,既傳輸網絡數字信號,又能傳輸24V的交流或直流電,也就是說,基于Pyxos FT技術的設備,可以同時從通信數據線上取得工作電源。這些特點,只適合一定負載范圍內使用,一旦一條P-bus總線上的Point節點負載總電流超過240A時,此時,P-bus總線上的電流已經不能夠驅動該總線上智能模塊正常工作,而應當給該總線上的智能輸出模塊單獨本地供電,供電電源仍為24V的交流或直流電。
P-bus總線上的智能繼電器輸出模塊所驅動的負載有容性負載,阻性負載,感性負載之分。設計使用過程中應充分考慮在不同負載情況下的啟動電流及實際工作電流。以免超負荷造成設備損壞。
通常情況下,一般把負載帶電感參數的負載,即符合和電源相比負載電流滯后負載電壓一個相位差的特性的負載為感性(如負載為電動機;變壓器;)。通俗地說,即應用電磁感應原理制作的大功率電器產品,如電動機、壓縮機、繼電器、日光燈等等。
這類產品在啟動時需要一個比維持正常運轉所需電流大得多(大約在3-7倍)的啟動電流。
感性負載、阻性負載:對于燈具來講,靠氣體導通發光的燈具就是感性負載,靠電阻絲發光的屬于阻性負載,感性負載如:日光燈、高壓鈉燈、汞燈、金屬鹵化物燈等。
阻性負載如:碘鎢燈、白熾燈、電阻爐、烤箱、電熱水器、熱油汀等。電機也屬于感性負載。
幾種常用燈光的實際工作電流:(在電網電壓220V情況下)
1、400W高壓鈉燈單只燈,工作電流為3.1~3.3A。
2、250W高壓鈉燈單只燈,工作電流為2.0~2.3A。
3、400W金屬鹵化物燈單只燈,工作電流為2.0~2.2A。
4、250W金屬鹵化物燈單只燈,工作電流為1.4~1.6A。
5、電感式鎮流器40W日光燈單只燈,工作電流為0.28~0.30A。
6、電子式鎮流器40W日光燈單只燈,工作電流為0.14~0.16A。
根據以上數據可知,燈光耗電除燈光本身外,鎮流器也消耗電能。
由于編程軟件內供一個Pilot節點(智能控制器)及其附屬Point節點(從設備)使用的I/O節點數共255個,在設計回路時,需要根據IO變量的數量確定P-Bus總線上掛接現場模塊的數量,在一個智能控制器(P-Bus主節點)下面,所有模塊的輸入輸出回路的最大數量最多為255個。
2. P-Bus系統的組成
P-Bus系統設計包含了現場控制系統、計算機控制系統兩大部分,其中現場控制系統由安裝在現場的智能控制器(P-Bus主節點)和現場控制模塊(P-Bus從節點)及相關的傳感器或受控設備組成。現場系統是不依賴計算機的獨立系統。計算機控制系統是以軟件為基礎的圖形化監控系統,在需要中央監控時需要配置。

